
- 與人一起工作的 10 kg 便攜式協作機器人
- 通過檢測外部施加的力,機器人自動停止的「安全駕駛」可以與人協作。
- “安全設計”,確保臂部的間隙,防止手和手指夾住
- 通過「直接教學」,通過直接握持手臂來教導操作,實現直觀的機器人操作
- 智慧吊墜支援,通過簡單的操作教授機器人
| HC10DT 系列 |
HC10DTP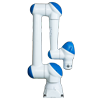 |
HC10DT 手提型  |
HC10DTP( 防塵、防滴規格)  |
HC10DTFP( 食品規格)  |
|---|---|---|---|---|
| 可搬運重量 | 10 kg | 10 kg | 10 kg | 10 kg |
| 最大覆蓋面 | 1379 mm | 1379 mm | 1379 mm | 1379 mm |
| 保護等級 | IP20 | IP20 | IP66/IP67 | IP66/IP67 |
| 格式 | YR-1-06VXCP10-A00 | |
|---|---|---|
| 結構 | 垂直鉸接類型(6 自由度) | |
| 可搬運重量 | 10 kg | |
| 最大覆蓋面 | 1379 mm | |
| 位置重複精度∗1 | 0.05 mm | |
| 工作範圍 | S軸(迴轉) | -210° ~ +210° |
| L軸(下臂) | -180° ~ +180° | |
| U軸(上臂) | -290° ~ +290° | |
| R軸(手腕旋轉) | -210° ~ +210° | |
| B軸(手腕擺動) | -180° ~ +180° | |
| T 軸(手腕旋轉) | -210° ~ +210° | |
| 最大速度∗2 | S軸(迴轉) | 2.27 rad/s,130°/s |
| L軸(下臂) | 2.27 rad/s,130°/s | |
| U軸(上臂) | 3.14 rad/s,180°/s | |
| R軸(手腕旋轉) | 3.14 rad/s,180°/s | |
| B軸(手腕擺動) | 4.36 rad/s,250°/s | |
| T 軸(手腕旋轉) | 4.36 rad/s,250°/s | |
| 前端位置最大速度 | 協作運行模式 | 1000 mm/sec∗5 |
| 正常操作模式 | 2000 mm/sec | |
| 允許力矩 | R軸(手腕旋轉) | 27.4 N·m |
| B軸(手腕擺動) | 27.4 N·m | |
| T 軸(手腕旋轉) | 9.8 N·m | |
| 允許的慣性矩 (GD2/4) | R軸(手腕旋轉) | 0.78 kg·m2 |
| B軸(手腕擺動) | 0.78 kg·m2 | |
| T 軸(手腕旋轉) | 0.10 kg·m2 | |
| 主體品質 | 48 kg | |
| 保護等級 | IP20 | |
| 安裝環境 | 溫度 | 0 ℃ ~ +40 ℃ |
| 濕度 | 20% 至 80% RH(無冷凝) | |
| 振動加速度 | 4.9 米/秒2(0.5 G) 或更少 | |
| 高程 | 1000 米或更少 | |
| 電源容量∗3 | 1.0 kVA | |
| 安裝方法∗4 | 落地式, 懸吊, 壁掛式, 傾斜式 | |
| 應用控制器 | YRC1000micro,YRC1000 | |
-
∗1:位置重複精度符合 JIS B 8432 標準。
-
∗2:表中的最大速度是最大值,根據負載、姿態和工作範圍等條件而變化。
-
∗3:電源容量是公司測量條件的值,根據負載、操作模式和循環時間而變化。
-
∗4:壁掛式和傾斜安裝時,S 軸的操作範圍受到限制。
-
∗5:應根據風險評估的結果將其設置為安全速度。